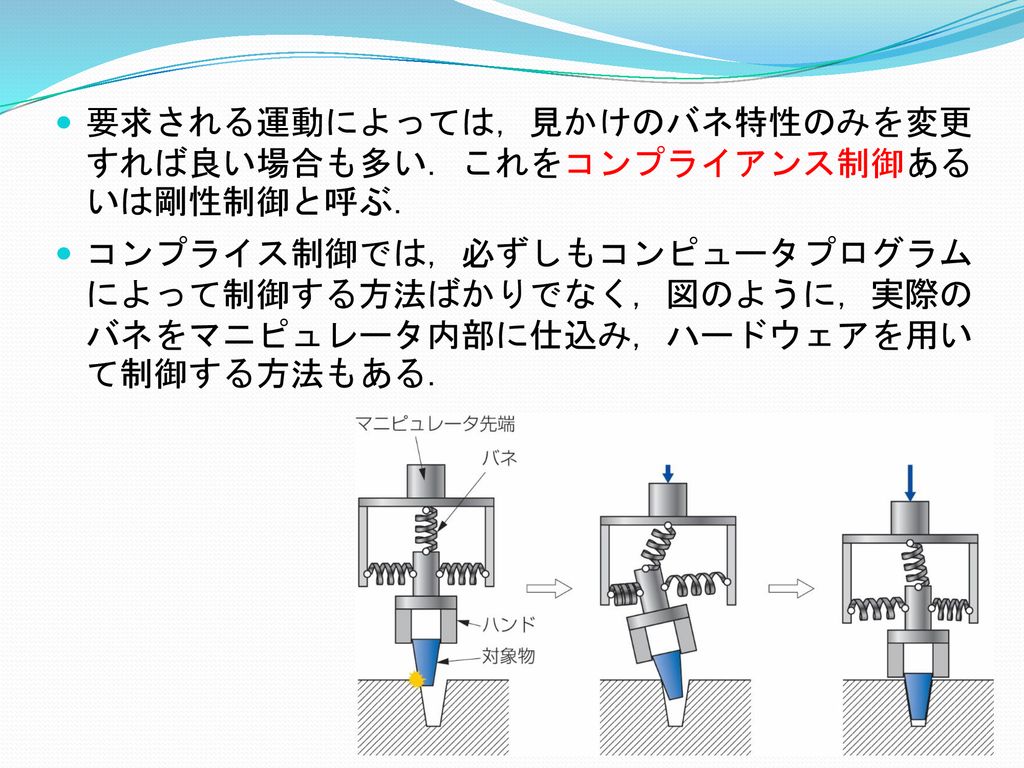
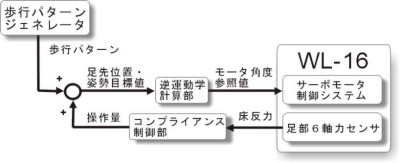
コンプライアンス 制御
4.7 仮想コンプライアンス制御方式の特質 / p105 (0057.jp2) 4.8 結言 / p107 (0058.jp2) 第5章 仮想コンプライアンス制御方式を用いた力制御ロボット / p109 (0059.jp2).

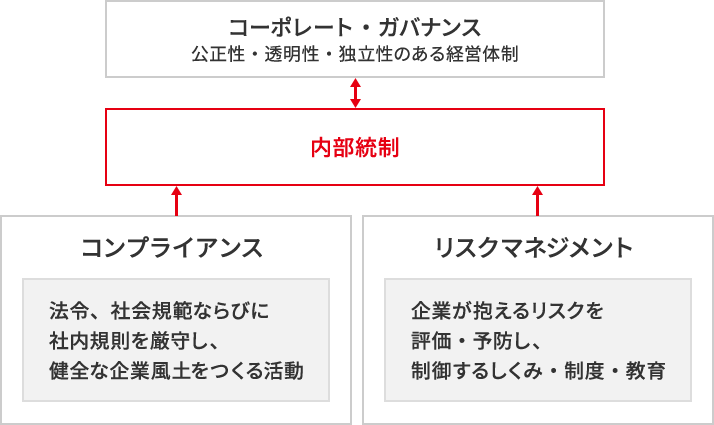
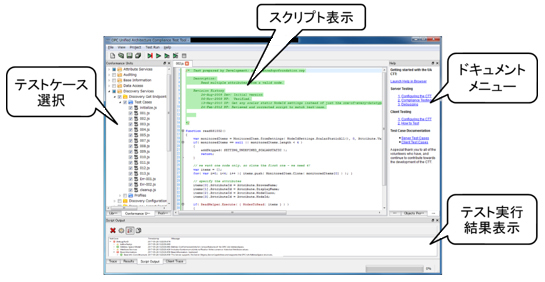
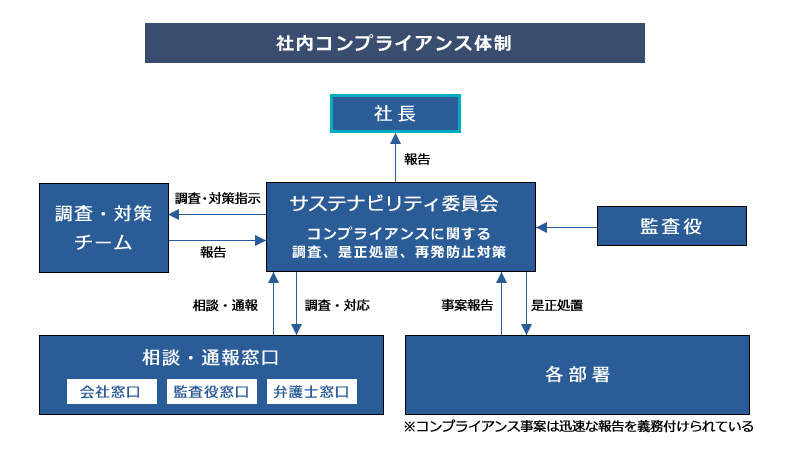
コンプライアンス 制御. ③コンプライアンス・リスクを事前に察知し低減・制御するために策定している方針及 び構築している内部統制並びにこれらの実行のあり方 ④コンプライアンス・リスク管理のために、ガバナンス態勢を構築する上で取り組んで いること。. OPC Foundationは、コンプライアンスを確認するために、3つのサービスを提供しています。 1) 自分で確認する・・・テストツール OPC UAの仕様に準拠しているかどうかの確認作業を支援するため、OPC Foundationはテストツール Compliance Test Tool (CTT) を提供しています。. (57)要約 課題 接触安定性と位置制御精度の両者共に良好な コンプライアンス制御系を実現すること。 解決手段 マニピュレータに力およびトルクのフィ ードバツク制御を構成し、その上位に、位置、速度、加 速度のフィードバツク制御を構成したことを特徴とする 力トルクベース.
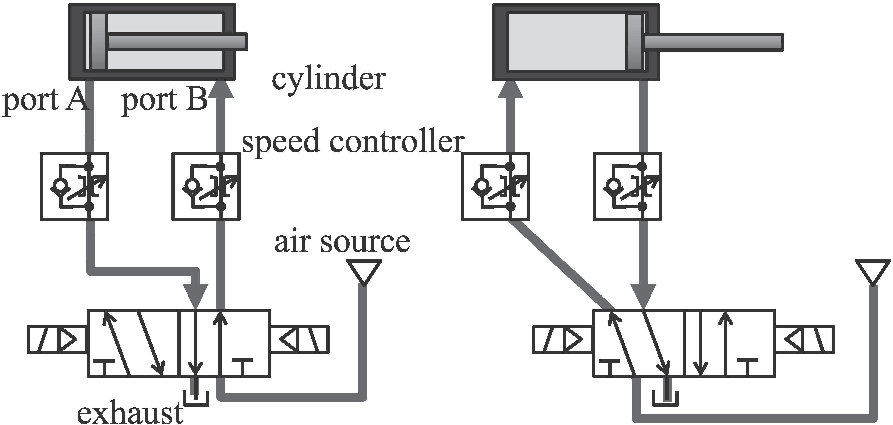
2 した油圧サーボシステムは,両ロッドシリンダ, 片ロッドシリンダからなる油圧シリンダをフラ ンジ継手を対向させ,両ロッドシリンダを制御用,. インピーダンス制御(位置入力 ・力出力) 目標位置と目標インピーダンス(バネ・マス・ダンパのパラメータ)を決めた状態でエンドエフェクタに力が加わると、目標位置に留まるように関節の固さ(軟らかさ)を調整する。アドミッタンス制御のように、力に流されるのではなく、寧ろ. 4桂 川 敬 史 五百井 清 久保田 伸 幸 野 呂 治 Fig.
労働安全衛生の法規制・コンプライアンス対応を支援するソリューションを提供開始 安全管理を自主的・継続的に実施するpdca運用を支援し、安全管理の質向上に貢献 株式会社日立ソリューションズ(本社:東京都品川区、取締役社長:星野 達朗/以下、日立ソリューションズ)は、建設業や. コンプライアンス制御に基づく環境外乱を考慮した車椅子型移動ロボットの一構成法 桂 誠一郎 , 大西 公平 電気学会論文誌. コンプライアンス制御,インピーダンス制御それぞれの制御則を導出した.rv-1a はサーボ系が 公開されているために,制御則から計算される位置指令値をサーボ系への目標値として与えるこ とで受動的な力制御を実現できた..
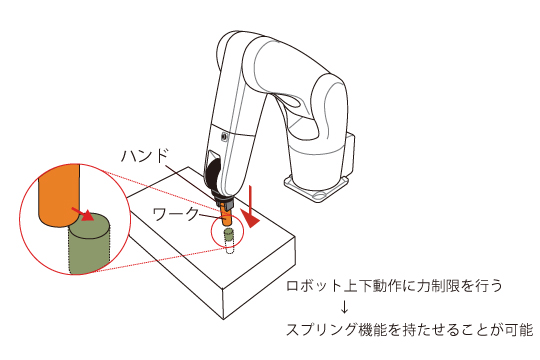
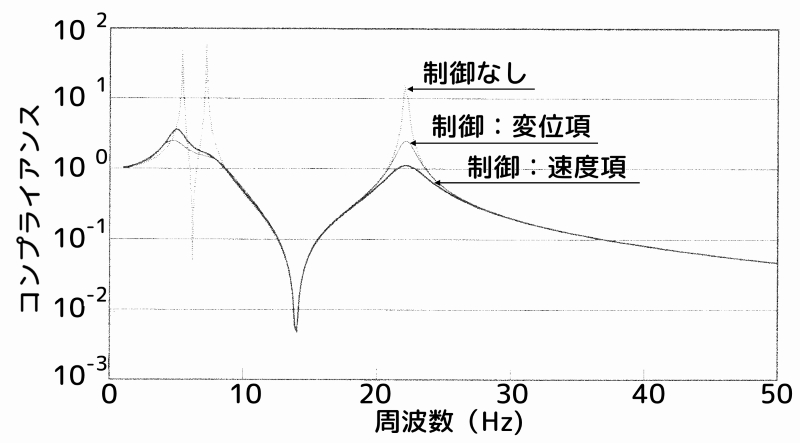
ASCII.jpデジタル用語辞典 - コンプライアンスの用語解説 - 法律や社会的な通念を守ること。 法令順守と訳されることが多い。 1990年代後半から企業の法律違反に端を発する事件が相次いで発生したことから、企業はより厳密に法律を守るべきという社会的要請が強まっている。. P制御のまとめ X goal どうやら... •最終的に目標値(x=1.0)に達しない? •はじめに振動するかどうかは,ダンパの大きさに依存? 用語 定常偏差(offset) 過渡状態 定常状態 overshoot hunting 目標値 P制御の数学 X goal •システム •力の制御の仕方 •つまり. 1 Example of Constrained Work 結果を示し,特 性比較を行う.
①.受動的(パッシブ)なステア角制御(ロールステア、コンプライアンスステ ア等) ②.能動的(アクティブ)なステア角制御(4ws) ①、②は図1-1 において、比較的横加速度の低い領域であり、主として線形領. D, 産業応用部門誌 = The transactions of the Institute of Electrical Engineers of Japan. 21年1月25日(月) ~1月29日(金) 条件反射制御法実地研修(第64回) (年度 第8回) 下総精神医療センター:.
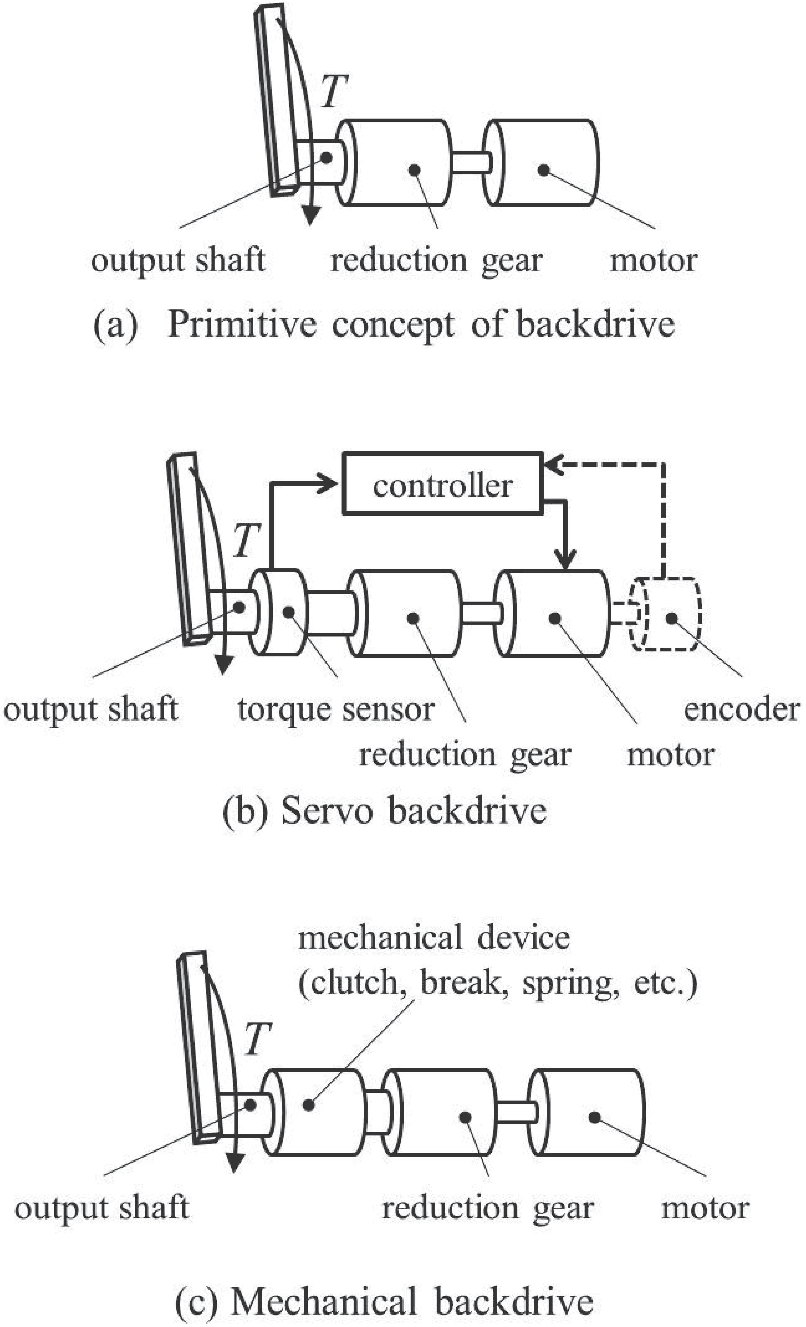
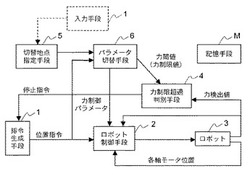
アクティブ・コンプライアンスの制御はマイクロコントロー ラで行い,内部処理は主として制御演算部とシステム制御 部とに分けられる(図。)2 制御演算部は外力推定と定電流,コンプライアンス,位 置,力制御,pwm変調に必要な演算を行い,システム制御. 先述した訓練機器制御に関する研究の多くは,インピーダンス制御を用いている.平林 ら (6) が発表した仮想コンプライアンス制御も広義ではインピーダンス制御の一種であり,. 出力軸のトルクが零(厳密には極めて小さな値)になるように制御するので、出力軸に力を加えると、 簡単に動かすことができる。 ⇒ ダイレクトティーチング:.
条件反射制御法実地研修(第63回) (年度 第7回) 下総精神医療センター:. 343 計測自動制御学会論文集 Vol.22, No.3 (昭和61年3月) 多自由度ロボットの仮想コンプライアンス制御† 平 林 久 明*・杉 本 浩 一*・荒 井 信 一*・坂 上 志 之*. D, A publication of Industry Applications Society 122(9), 942-947,.
コンプライアンス制御は接触力を検出するセンサと,力を変えられるダイレクトドライブ モータなどを組合せる。 出典 ブリタニカ国際大百科事典 小項目事典 ブリタニカ国際大百科事典 小項目事典について 情報. 冗長ロボットアームのためのコンプライアンス制御の一手法 横井 一仁 , 前川 仁 , 谷江 和雄 日本ロボット学会誌 11(1), 121-130,.

1998 号 マニピュレータのコンプライアンス制御方式 Astamuse

電動トルクアクチュエータ ゼロトルク制御 コンプライアンス制御 Youtube

臨界減衰条件を考慮した6自由度ロボットマニピュレータのインピーダンス制御
コンプライアンス 制御 のギャラリー

クーカ ロボター ゲーエムベーハー による特許

ガバナンス 株式会社オリジン

東京都市大学 Rls研究室 Dual Arm Robot Group

マニプレータ マニプレータ装置を持つ小室 B25j 1995年分 151件
Wl 16 Waseda Leg No 16
ロボットとアクチュエータのバックドライバビリティ ロボ學 Robogaku

レオメータ制御システム
2
Www Azbil Com Jp Corporate Pr Library Review Pdf 09 12 10 Pdf

1996 号 仮想コンプライアンス制御を適用するバリ取り方法 Astamuse

医療機器メーカーは 品質管理プロセスを制御することで革新的な製品をいち早く市場に投入できる Ptc

電流出力dacによる正確なトランスデューサ制御 Digikey
学位論文要旨詳細
Jfps 日本フルードパワーシステム学会

内部統制システム 組織統治 Csr 環境 エプソン
Www Toshiba Co Jp Tech Review 11 05 66 05pdf F04 Pdf
コンプライアンス制御の意味 用法を知る Astamuse
インピーダンス制御とコンプライアンス制御 Gggggraziegrazie
Q Tbn 3aand9gcre7f8pdck0hx5dc9fqhgkmpvy3tprm0ef3df A86mzhdqe35lh Usqp Cau

リスク コンプライアンス Kioxia
力センサ有コンプライアンス機能 ロボット機能 製品 産業用ロボット デンソーウェーブ

藤本研 研究テーマ
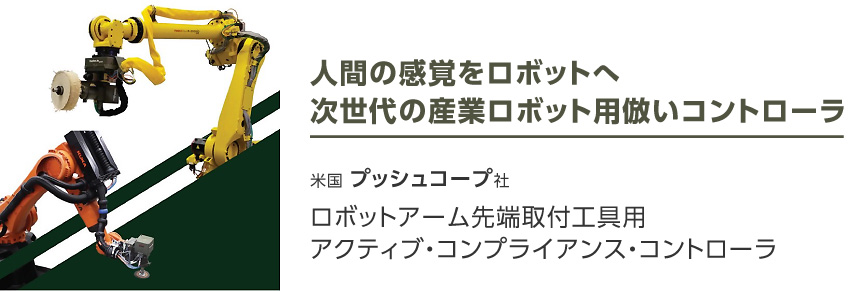
プッシュコープ社 ロボットアーム先端取付工具用アクティブ コンプライアンス コントローラ 愛知産業株式会社
彡 マッサージロボット 続編 株式会社ロボメカニクス研究所
コンプライアンス リスクマネジメント 社会性報告 社会 環境 Csr 帝人株式会社
ロボットとアクチュエータのバックドライバビリティ ロボ學 Robogaku

Jpa ロボットの制御方法 Google Patents

B 図3 アクセス制御を抜けた先では 情報制御 を行う B 日経クロステック Xtech

ロボット モ ション 3 マイケル ブラディ 紀伊國屋書店ウェブストア オンライン書店 本 雑誌の通販 電子書籍ストア

ロボット制御における特異点 エクサウィザーズ Engineer Blog

電子情報開示調査のためにコンプライアンスの境界を設定する Microsoft 365 Compliance Microsoft Docs
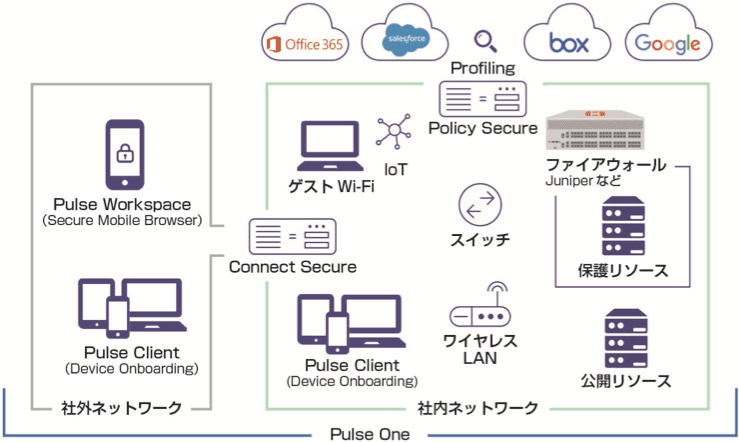
Pulse Secure パルスセキュア ジェイズ コミュニケーション

臨界減衰条件を考慮した6自由度ロボットマニピュレータのインピーダンス制御

Wo1709a1 外力追従制御システム Google Patents

799円でpcからフタバ製コマンド方式サーボを動かそう ぷらぎあ工房

コンプライアンス制御 Youtube

1994 号 コンプライアンス制御装置 Astamuse

開放特許情報データベース 開放特許情報データベース

知能機械制御学研究室
インピーダンス制御とアドミッタンス制御 Gggggraziegrazie
Http Www Fha Sd Keio Ac Jp Jka17 17jka Report Final Pdf
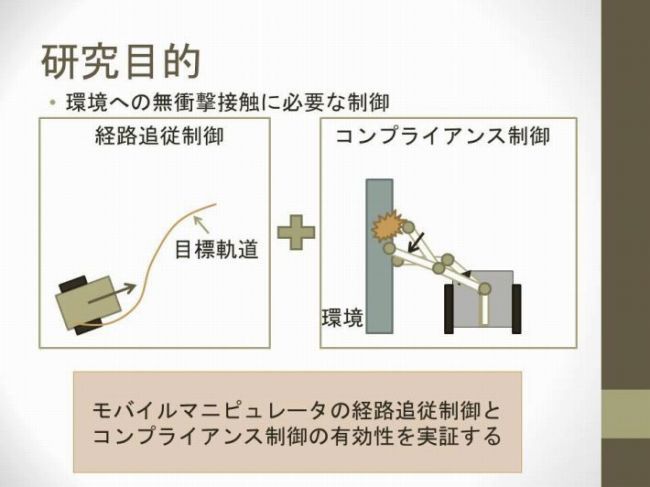
モバイルマニピュレータ 豊田工業大学 制御システム研究室
Jfps 日本フルードパワーシステム学会
Q Tbn 3aand9gcrk3bql2s3yduqopy2nkw4udonjotjhzf3kxeuqtf8 Usqp Cau

Forescout 商品情報 Forescout Platform 産業用制御システム向けセキュリティ
デンソーウェーブはエクサウィザーズの Corevery を採用し マルチモーダルai技術による コンプライアンス制御 フロー生成 模倣動作学習 を実現 年7月から販売予定 デンソーウェーブのプレスリリース

デンソーウェーブはエクサウィザーズの Corevery を採用し マルチモーダルai技術による コンプライアンス制御 フロー生成 模倣動作学習 を実現 年7月から販売予定 株式会社エクサウィザーズ

Robotec 電動トルクアクチュエータ
学位論文要旨詳細
うんたらかんたら制御方式 Haraduka S Diary

アクセス制御管理 Omnicontact 株式会社アセンド

出願人 株式会社安川電機 の特許一覧 日本特許情報 発明ナビ
Http Journal Vrsj Org 13 2 S23 26 Pdf
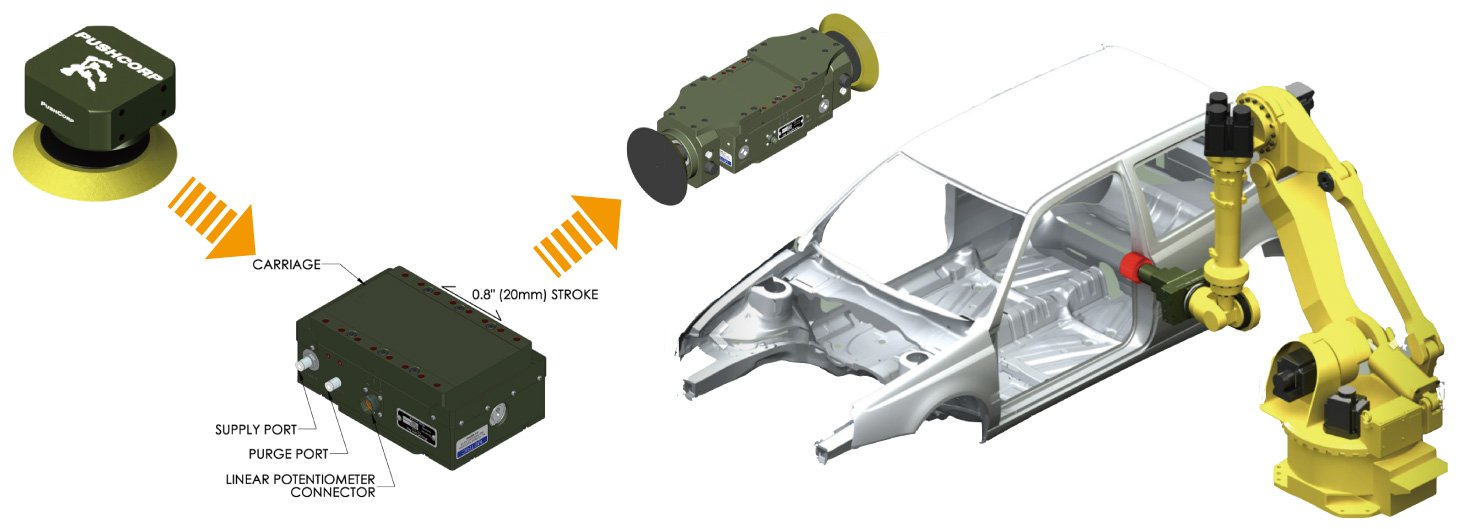
プッシュコープ社 ロボットアーム先端取付工具用アクティブ コンプライアンス コントローラ 愛知産業株式会社
オリジナル解説 Opc Uaとは 第4回 Opc Uaの活動 2 コンプライアンス オムロン制御機器
Http Www Topic Ad Jp Sice Htdocs Papers 252 252 2 Pdf
セキュリティとコンプライアンス Box
Http Www Hondafoundation Jp Data Files View 300
本研究室の修士2年生の遠池亮成君がシステム制御 情報学会研究発表講演会 Sci で学生発表賞を受賞しました 新着情報 知能ロボティクス研究室 牛田研究室
Www Azbil Com Jp Corporate Pr Library Review Pdf 09 12 10 Pdf

Robotec
ロボット工学 第14回 インピーダンス制御 福岡工業大学 工学部 知能機械工学科 木野 仁 Ppt Download
ポリシーのコンプライアンス データを取得する Azure Policy Microsoft Docs

Robotec

Office 365 セキュリティとコンプライアンス
安全な協働ロボットのための壊れにくい力覚センサの開発 1 Sens Aitプロジェクト
シャドーitを検知 制御するクラウドアクセス管理 Casb Netskope Nriセキュア

コンプライアンス制御ユニット Fill Ide Compressors デジタル タッチスクリーン式
トヨタ企業サイト トヨタ自動車75年史 技術開発 シャシー
コンプライアンス機能 ロボット機能 製品 産業用ロボット デンソーウェーブ
Lq最適制御による振動制御系設計入門 実験とシミュレーションとはかせ工房
2
Http Journal Vrsj Org 13 2 S23 26 Pdf
コンプライアンス 住友共同電力
Asimo
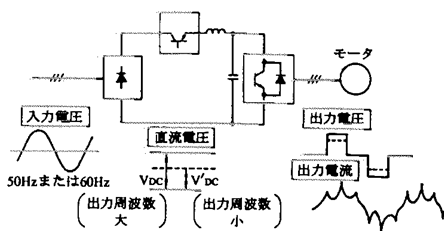
種類と特徴 インバータとは インバータ 製品 ソリューション 安川電機
Http Www Hondafoundation Jp Data Files View 300

産業用ロボット Melfa Sq Sdシリーズ 三菱電機 株 Mitsubishi デジアナeカタログ メカトロネット

コンプライアンスステア Aki Rsのブログ 白ロドとゆく みんカラ
Core Ac Uk Download Pdf Pdf

電動トルクアクチュエータ ゼロトルク制御 コンプライアンス制御 Youtube
Office 365 セキュリティとコンプライアンス
Workspace One ブログ コンディショナルアクセスとは 技術ブログ C S Engineer Voice
ガバナンスってなに コンプライアンス 全力支援 Htc ハイテクノロジーコミュニケーションズ

臨界減衰条件を考慮した6自由度ロボットマニピュレータのインピーダンス制御
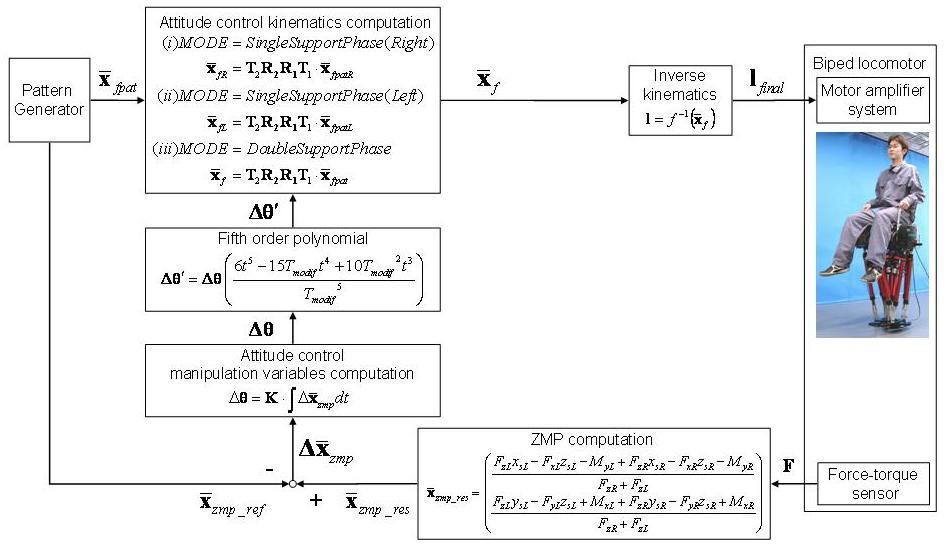
Wl 16riii概要

ガバナンス担当役員は コンプライアンス画面を触れています メタファーと技術のビジネス コンセプトは コンプライアンス制御 運用の透明性と It ガバナンスの実践します の写真素材 画像素材 Image
Http Www Fha Sd Keio Ac Jp Jka17 17jka Report Final Pdf
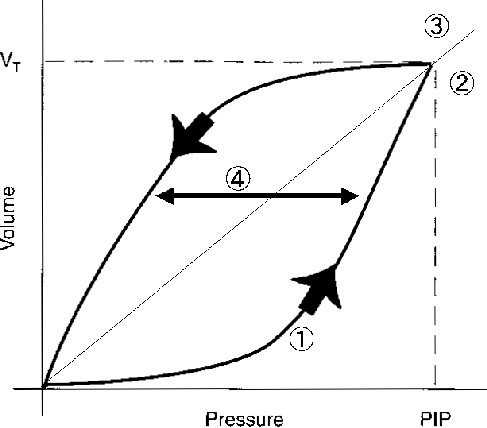
3 圧 容量曲線

外乱オブザーバの紹介 Qiita
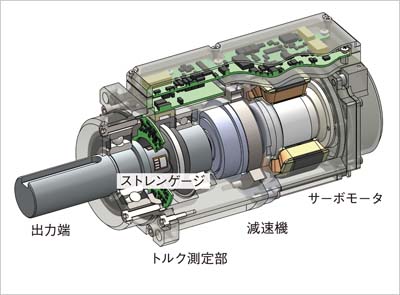
株式会社ロボテック 出力軸トルク測定機能付きサーボモータ ユニサーボ こだわり物語

仮想コンプライアンス制御の意味 用法を知る Astamuse
コンプライアンス 企業倫理とコンプライアンス ガバナンス 川崎重工業株式会社
特表19 知財ポータル Ip Force
力制御装置
Wl 16 Waseda Leg No 16

ロボット工学第2回資料
セキュリティとコンプライアンス Box
Salesforce モバイルアプリケーションへのアクセスの制御 単元 Salesforce Trailhead



